On the previous tutorial, I was presented how the Register
Transfer Level (RTL) designs methodology is successful to design a GreatestCommon Divisor (GCD) core engine.
Here again the same method I would like to apply it into
sequential multiplier unit. In the book
“Fundamentals of Digital Logic with VHDL Design” by Stephen Brown & Zvonko
Vranesic, they also provide one example to design this sequential multiplier.
However they name it as Shift-and-Add Multiplier.
Let’ me start with design
specification.
We are going to design a multiplier to multiply two an 8-bit
unsigned numbers to produces 16-bit product. For example 8-bit Data A multiply
with 8-bit Data B and produce 16-bit Product.
Algorithmic
modelling
In this step, we can translate the design specification to
produce the behavioural model of the multiplier. This model is expressed in
terms of an algorithm as shown in Figure 1, and this should be completed with
IO Block diagram of the top-level system as shown in Figure 2.

Figure 1:
Algorithm in Psedo-Code for sequential Multiplier for 8-bit input (n=8)

Figure 2:
Top-Level of Sequential Multiplier
RTL Modelling
The RTL Model is first provided in the form of an ASM
flowchart as shown in Figure 3. Then from the ASM flowchart, we can construct
the RTL control sequence table in the form of an RTL Code is derived as shown
in Table 1.

Figure 3: the ASM
Flowchart of Sequential Multiplier

Table 1: The
RTL-CS Table
Datapath
Figure 4 shows the datapath circuit for the sequential
multiplier. The datapath consist of two shift registers, namely shift-left
register for data A and shift-right register for data B. Other components are
adder, multiplexer and register to store the Product (result).

Figure 4:
Datapath of Sequential Multiplier
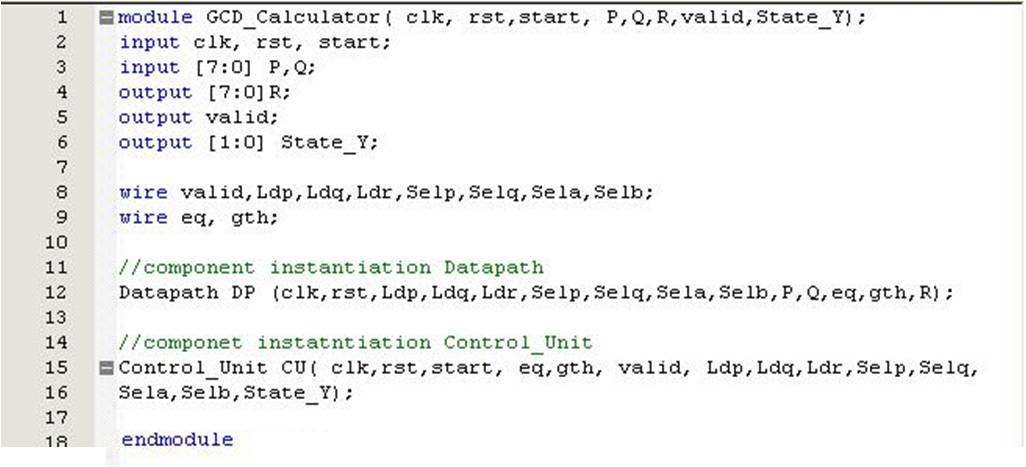
Meanwhile Figure 5 shows the top level datapath using
Verilog code.

Figure 5: A
Verilog Datapath code
Control Unit
The Verilog program in figure 6 shows how the control unit
is constructing using Moore Model. There are three separate blocks, Next-State
Logic block, State Register block and Output Logic block.


Figure 6: Verilog
Code for Control Unit Sequential Multiplier
Waveform Simulation
Figure 7 show example waveform simulation to perform
multiplication of hexadecimal number of FFh multiply with FFh. The product
should be FE01h. In decimal number represents 255 x 255 = 65025. Inputs A and B
are define as FF hexadecimal respectively. The sequential multiplier will be
start the processing the data according to control unit. You can verify the
state movement by State_Y output. Signal output valid will be asserted in state
S3 to indicate the process of multiplication is finish and the valid result (output
R) should be taken at the same clock. The state resume again at state S0. As you can see for the worst case (FFh xFFh)
the result should be ready around 18 clock cycles compare if I want to multiply
3 x 2 which is take only 5 cycles as shown in Figure 8.

Figure 7: Output
Waveform Simulation for test vector FFh x FFh

Figure 8: Output
Waveform Simulation for test vector 3h x 2h
Can you estimate the total clock cycles required if I would
like to multiply Data A =00h with Data B= FFh ? It’s there are redundant clock
have been waste? Can you do some improvement on this design? Please provide
your feedback here!